ปรับปรุงความสามารถในการใช้งาน
คําแนะนํา
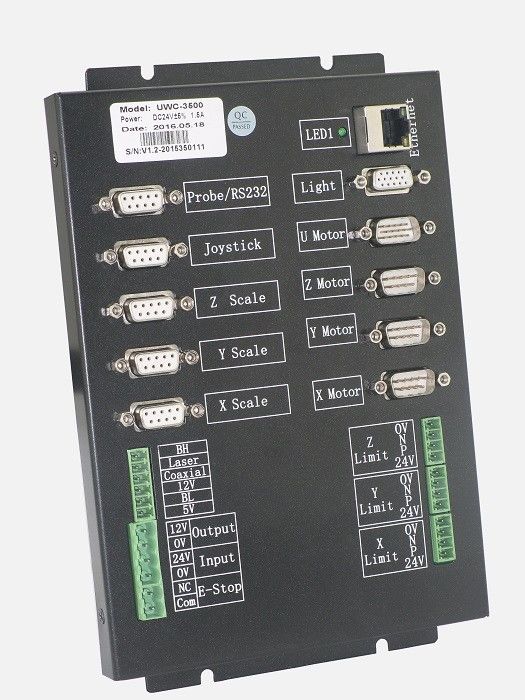
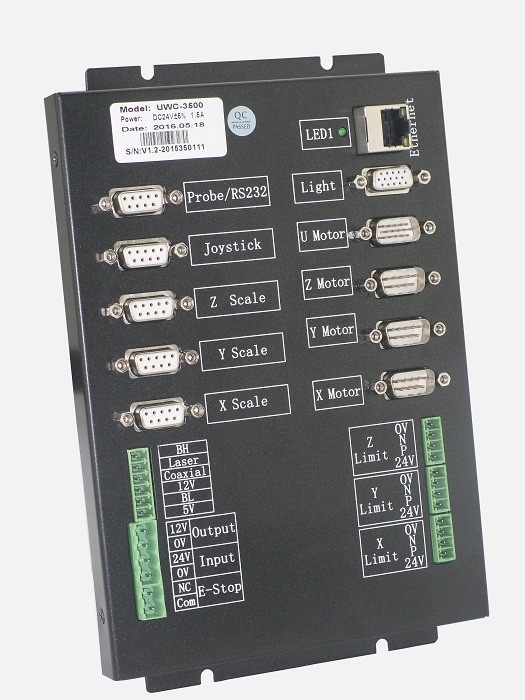
UWC 3500 เป็นเครื่องควบคุมวงจรปิดเต็ม 4 แกนทั่วไปที่ใช้ในเครื่องวัดสายตาและเครื่องวัดสายตาประกอบ หรือระบบวัดอัตโนมัติด้วยสภาวะเส้นตรงหรือเครื่องปรับรหัสมอเตอร์ วงจรปิดการตอบสนองตําแหน่ง, UWC3500 สามารถทําความแม่นยําสูง
ลักษณะ:
1โครงสร้างเครื่องยนต์ชั้นบนและชั้นล่างที่ก้าวหน้า CPU + FPGA ที่มีประสิทธิภาพสูง
2การสื่อสาร: อินเตอร์เฟซอีเทอร์เน็ต, เวลาในการทํางานสําหรับฟังก์ชัน API เดียวต่ํากว่า 0.45ms
3. การควบคุมทิศทาง + ปั๊มโหมด, สามารถควบคุมการปั้นมอเตอร์, AC servo, servo เส้นทางหรือ DDM เป็นต้น
4. การควบคุมการเคลื่อนไหวแบบปิดวงจรเต็มที่, การตั้งตําแหน่งความแม่นยําสูงที่รวดเร็ว, แม่นยําและคงที่. อัลการิทึมการควบคุมวงจรปิดที่ก้าวหน้าและปริมาตร PID น้อยมาก, รับประกันการหมุนง่ายสําหรับผู้ใช้
5. S ประเภทความเร็วเส้นโค้ง planing, สัดส่วนส่วน S ในกระบวนการลดความเร็วสามารถตั้ง
6กลยุทธ์การค้นหา:
การควบคุมวงจรเปิดแบบกระแทก + ทิศทาง
การควบคุมวงจรปิดการตอบสนองระดับเส้น / ตําแหน่งโคเดอร์ PID + VFF อัลกอริทึมที่ดีขึ้นกําจัดปัญหาการเคลื่อนที่ศูนย์
7. โหมดการเคลื่อนไหว:
จุดต่อจุด, JOG mode, homing mode ที่ใช้ง่ายและยืดหยุ่น, 2 axis หรือ 3 axis linear interpolation, horizontal arc interpolation, touch probe และโหมด joystick
8นโยบายความปลอดภัย:
ฟังก์ชันการปรับเปลี่ยนอัตโนมัติของเครื่องหมุน, การตั้งค่าล็อกติกและทิศทางขีดจํากัดโดยอัตโนมัติ, ปริมาตรของมอเตอร์และทิศทางการตอบสนองเชิงเส้น,ให้แน่ใจว่าการกําจัดความผิดพลาดการเคลื่อนไหว Feedback.
เมื่อแกนเคลื่อนที่ใกล้กับขีดจํากัด จะมีอัตราลดความเร็วล่วงหน้า และก่อนการตั้งทาง จะมีการจํากัดความเร็วในการเคลื่อนที่
โปรแกรมขั้นต่ําสนับสนุน
9.ฟังก์ชัน API ใช้การคล้องหน้าของวัตถุ, ซึ่งให้โปรแกรมง่าย. ปริมาตรส่วนใหญ่ถูกตั้งโดยโปรแกรมแก้ไข.
10การบูรณาการสูง, ผลงานสูง, การผลิตและการบํารุงรักษาที่มั่นคงและง่าย
11UWC-3500 ใช้เทคโนโลยีการผลิต SMT รับประกันความมั่นคงและความน่าเชื่อถือ
12. ด้วยความยืดหยุ่นสูง UWC3500 เหมาะสําหรับอุปกรณ์ที่ไม่มาตรฐานและยังปรับปรุงของฟังก์ชันมีอยู่
13. UWC3500 รองรับฟังก์ชันการอัพเดทฟอร์มแวร์ออนไลน์ ผู้ใช้ไม่จําเป็นต้องถอนตัวควบคุมจากเครื่อง, อัพเดทและขยายฟังก์ชันง่ายลดวงจรการพัฒนาและการหมุนของอุปกรณ์.
14โมดูลภายนอก UWC348 IO ขนาดสูงสุด 26 ใน 26 ออก
15. ตําแหน่งการเปรียบเทียบฟังก์ชันที่ตรงกันได้อย่างแม่นยํา ผู้ใช้งานยังสามารถตั้งระยะของกระตุ้นที่ตรงกันได้ การออกกระตุ้นสามารถเชื่อมต่อกับกล้องหรือเซ็นเซอร์เลเซอร์
16. การทํางาน stroboflash ปฏิบัติการการควบคุมแหล่งแสงและ CCD ตําแหน่งที่สอดคล้องกับการใช้งานการกด
17. โปรแกรมปรับปรุงความผิดพลาดที่มีความแรงรวม, การทํางานง่าย, ง่ายสําหรับผู้ใช้ที่จะเปิดเครื่อง.
ปริมาตร
| รายการ |
นาที
|
แบบปกติ
|
แม็กซ์
|
หน่วย
|
| เวลาทํางาน API |
0.425
|
0.43
|
0.45
|
ms
|
| ความแรงกดไฟฟ้าเข้า |
22.5
|
24
|
26
|
VDC
|
| ความดันไฟฟ้าช่วย 12V |
11.76
|
12.05
|
12.24
|
VDC
|
| ปริมาณการออกของกระแสพลังงานเสริม 12V |
0
|
2.0
|
2.5
|
A
|
| ความกระชับกําลังการออก 5V |
5.1
|
5.2
|
5.25
|
VDC
|
| การออกกระแสไฟฟ้า 5V |
0
|
1.8
|
2.0
|
A
|
| X/Y/Z อินเตอร์เฟซมอเตอร์ ความสามารถในการบรรทุก 24V |
0
|
3.0
|
4.0
|
A
|
| ความถี่ของแรงผลักดันทิศทาง |
-
|
-
|
6.5
|
MHz
|
| ความละเอียดของความถี่ |
0.006
|
-
|
-
|
Hz
|
| ระยะการนับขนาดเส้นตรง |
- 2147483648
|
-
|
2147483647
|
CNT
|
| ระยะการนับจังหวะทิศทาง |
- 2147483648
|
-
|
2147483647
|
CNT
|
| ระดับการปรับความเร็ว |
-
|
-
|
1,000,000,000
|
DDS 32 บิต
|
| รองรับความละเอียดขนาดเส้น |
- 001
|
-
|
10000
|
อืม
|
| ความถี่การออกสัญญาณขนาดเส้น |
-
|
-
|
6.5
|
MHz
|
| การเข้า/ออกทั่วไปของตัวควบคุม |
-
|
-
|
-
|
สถานี
|
| อินเตอร์เฟซการสื่อสาร RS232 ความเร็วสูง |
-
|
2
|
-
|
สถานี
|
| ทางเข้า / ทางออกภายนอก (ใช้อินเตอร์เฟซการสื่อสาร RS232 หนึ่ง) |
-
|
24/24
|
-
|
สถานี
|
| ปัจจุบันการขับเคลื่อนขั้นตอนออก |
0.07
|
-
|
1.15
|
A ((RMS)
|
| หน่วยขับขี่ขั้นตอน |
16
|
16
|
16
|
|
รายละเอียด
| ไม่ |
รายละเอียด
|
UWC3500
|
| 1 |
จําหน่ายพลังงาน
|
DC24V@2A ทางเข้า, ทางออก DC12V@2A ((มอบพลังงาน CCD)
|
| 2 |
การวัดความเหมาะสมของซอฟต์แวร์
|
รองรับ V1 ได้อย่างเต็มที่4
|
| 3 |
ขนาด
|
255 * 118 * 53 ((มม)
|
| 4 |
การสื่อสาร
|
USB หรือเอเธอร์เน็ตแยก (ไม่จําเป็น)
|
| 5 |
นโยบายการควบคุมวงจรปิด
|
PID + VFF + วงศ์ตาย
|
| 6 |
ความถี่การอัพเดทของเซอร์โว
|
2.5KHz
|
| 7 |
ป้องกันแรงกระแทกทางกล ปรับความเร็วให้ดีที่สุด
|
โหมด SMART
|
|
| 8 |
แกนของการนับตัวแปลงเส้นตรง
|
3
|
|
| 9 |
แกนควบคุมพื้นฐาน
|
4
|
|
| 10 |
ค่าใช้จ่ายของแกน
|
สามารถเพิ่ม 3 แกนแรงกระแทก + ทิศทาง
|
|
| 11 |
โหมดควบคุมแกน XYZ
|
อัมพวาส + ทิศทาง RS422
|
|
| 12 |
ประเภทของมอเตอร์ที่รองรับแกน XYZ (มีเครื่องขับมอเตอร์ภายนอก)
|
สเปน / แอคเซอร์โว / ลินีเออร์เซอร์โว / ดีซีเซอร์โวพร้อมการตอบสนองของโคเดอร์
|
|
| 13 |
ระบบควบคุมแกน U A
|
RS232 เชื่อมต่อกับเลนส์ซูมอัตโนมัติ Pomeas
|
|
| 14 |
ระบบควบคุมแกน U B
|
2 ขั้นตอนการขับเคลื่อนขั้นตอนที่ติดตั้ง, ซึ่งสนับสนุนเลนส์ซูมอัตโนมัติด้วยมอเตอร์ขั้นตอน, จํากัดเพียง / duo ได้รับการสนับสนุน.
|
|
| 15 |
การวางแผนเส้นโค้งความเร็ว
|
แบบบันได/S
|
|
| 16 |
การสับสน
|
การแทรกแซงเส้นตรงหลายแกน การแทรกแซงวงศ์ 2แกน การแทรกแซง 3แกน
|
| 17 |
สูงสุด ความถี่ของหัวใจ
|
5MHz
|
|
| 18 |
ความละเอียดความถี่ของกระแทก
|
0.001Hz
|
|
| 19 |
ระดับการปรับความเร็ว
|
1,000,000,000
|
|
| 20 |
ระบบควบคุมความแรงดันแบบอนาล็อก
|
-
|
|
| 21 |
ความถี่การนับของเครื่องแปลงเส้น
|
6MHz/ ((A หรือ B Phase)
|
|
| 22 |
การกําหนดสัญญาณของเครื่องแปลงเส้น
|
R หรือ S สําหรับตัวเลือก (R:12345, S:26789)
|
|
| 23 |
อุปกรณ์การวัดเครื่องสํารวจ
|
วงจรอินเตอร์เฟซซอนด์สัมผัส
|
|
| 24 |
วงจรการประมวลผลความผิดพลาดของเครื่องสํารวจ
|
สามารถซ่อมแซมอัตโนมัติของสัญจร nonhoming
|
|
| 25 |
โซนด์ที่เข้ากันได้
|
เรนิชอว์ / เทซ่า ทุกซีรีส์เครื่องตรวจจับการสัมผัส
|
|
| 26 |
โมดูลการประมวลผลซอนด์
|
วงจรปิดความเร็วสูง, จอยสติ๊กควบคุมจุดสัมผัส การหยุดยั้งอัตโนมัติและการถอยถอยอัตโนมัติ, รูปแบบจุดตรวจจับอัตโนมัติ
|
|
| 27 |
การ์ดเก็บสัญญาณ joystick ที่ติดตั้ง
|
ความละเอียด 12 บิท, การใส่ความแรงดันแบบแอนาล็อก 0-5V, ปุ่มกด 3 ปุ่มและ LED 3 ปุ่ม, ติดปิดฉุกเฉินรวม, ปุ่มปรับความเร็วรวม (ใช้กันและกันยกเว้นกับปุ่ม 3 #)
|
|
| 28 |
การ์ดควบคุมการส่องแสง
|
8 ช่องแสงพื้นผิว + แสงด้านล่าง + แสงโคเอชเชียล โปรแกรมปรับระดับ 0-200
|
|
| 29 |
ฟังก์ชันการตั้งค่าระดับแสง
|
การปรับฮาร์ดแวร์ระดับ 16 ในฐานการตั้งค่าปารามิเตอร์ตามความสว่างที่ต้องการ
|
|
| 30 |
ความสามารถในการควบคุมแสงโค้ง / การควบคุม LED bank
|
สูงสุด 420mA เหมาะสําหรับเครื่องจักรเดินทางขนาดใหญ่
|
|
| 31 |
อินเตอร์เฟซการส่องแสงแบบซับซ้อนภายนอก
|
สามารถเชื่อมต่อกับ 5 แหวน 8 ส่วนสีเดียวโปรแกรมแสง, หรือ 5 แหวน 8 ส่วน 4 สีโปรแกรมแสง, สูง / แปลงแสง
|
|
| 32 |
อินเตอร์เฟซ I/Oทั่วไป
|
8 ส่วนแยกทางเข้า, 5 ทางออก (ULN2803 รองรับ)
|
|
| 33 |
นาฬิการะบบ
|
ปี เดือน วัน ชั่วโมง นาที วินาที ไม่สามารถปรับเปลี่ยนได้
|
|
| 34 |
อัพเกรดฟอร์มแวร์
|
การปรับปรุงลูกค้าบนเว็บไซต์ ให้บริการแก้ไขอย่างรวดเร็วและอัพเดททางเทคนิค
|
|
| 35 |
เครื่องเชื่อมเครื่องสํารวจ
|
เครื่องเชื่อม 9 ปิน D-DUB สะดวกต่อสายไฟและมั่นคงมากขึ้น
|
|
| 36 |
เครื่องเชื่อม joystick
|
OTP6, OTP7, HC3 ((จอยสติกหลายคีย์)
|
|
| 37 |
การประมวลผลข้อมูล joystick
|
เครื่องควบคุมภายในประมวลผลข้อมูล joystick และการควบคุมการเคลื่อนไหว, กันและกันกับโหมดการควบคุมการเคลื่อนไหวอื่น ๆ, โซนด joystick การสัมผัสกับการหยุดอัตโนมัติและการถอนอัตโนมัติ
|
|
| 38 |
การหยุดฉุกเฉินภายนอก
|
ปุ่มหยุดฉุกเฉินควบคุมพลังงานของมอเตอร์
|
|
| 39 |
การวางแผนเส้นโค้งความเร็ว
|
ระดับบันได / S
|
|
| 40 |
เครื่องปรับขีดจํากัดของซอฟต์แวร์
|
มี
|
|
| 41 |
จุดความช้าของซอฟต์แวร์
|
มี
|
|
| 42 |
ระยะทางเบรกที่กําหนดไว้
|
มี
|
|
| 43 |
โปรแกรมแก้ไขข้อผิดพลาดที่รองรับ
|
เวอร์ชั่น V4.0 ขึ้นไป (การตรวจจับและการตั้งค่าพารามิเตอร์ด้วยอัตโนมัติ)
|
|

 ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!
ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!